


خطای رادار جلو MVM X55 Pro
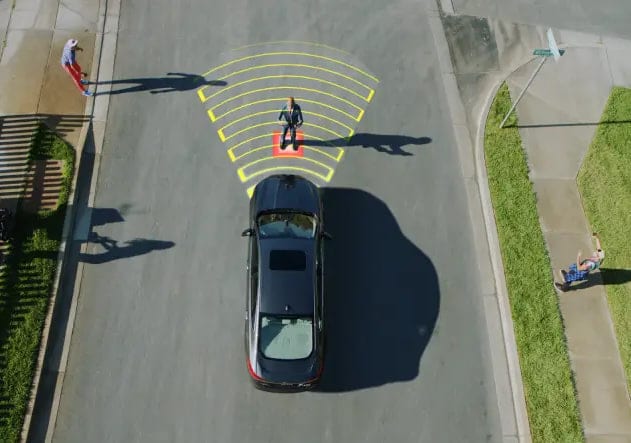
رادار جلو در خودروهای مجهز به سامانههای ایمنی پیشرفته یا سیستمهای کمکراننده (ADAS) مانند MVM X55 Pro یکی از اصلیترین حسگرهایی است که وظیفه تشخیص فاصله تا اجسام را برعهده دارد. این رادار بر اساس ارسال امواج فرکانس بالا، معمولاً در محدوده ۷۶ تا ۸۱ گیگاهرتز، عمل کرده و بازتاب این امواج را برای محاسبه فاصله و سرعت اجسام مقابل تحلیل میکند. واحد کنترل مرکزی خودرو، دادههای دریافتی از رادار را برای فعالسازی سامانههایی مثل کروز کنترل هوشمند، ترمز خودکار اضطراری و هشدار برخورد استفاده میکند.
ساختار فیزیکی رادار شامل یک ماژول آنتن، مدار فرستنده و گیرنده، و واحد پردازش داخلی است که در پشت سپر جلو قرار دارد. طراحی محل نصب آن باید به گونهای باشد که زاویه دید روبهجلو را بدون انسداد کامل پوشش دهد و در هنگام حرکت یا ترمز شدید کمترین میزان لرزش را تجربه کند. در خودروهایی مانند MVM X55 Pro یا چری تیگو، ماژول رادار با ECU سیستم ترمز و واحد دوربین جلو هماهنگ کار میکند تا تصمیمات اصلاح مسیر یا توقف را بگیرد. هرگونه اختلال در عملکرد این مجموعه مستقیماً تأثیر خود را بهصورت خطای رادار جلو روی نمایشگر یا سیستم کنترل مرکزی نشان میدهد.
دلایل بروز خطای رادار جلو MVM X55 Pro
خطای رادار جلو MVM X55 Pro میتواند از عوامل متعددی ناشی شود؛ از نقص ارتباطی میان رادار و واحد مرکزی گرفته تا اختلال در سطح سنسور یا پوشش محافظ سپر. یکی از دلایل رایج ایجاد خطا، آلودگی سطح رادار مانند گل، گرد و غبار، یا قطرات آب خشکشده است که باعث تضعیف سیگنال بازتابی و کاهش دقت اندازهگیری میشود. همچنین تغییر موقعیت فیزیکی ماژول پس از تصادف یا فشار وارده به سپر موجب انحراف زاویه تابش امواج شده و دادههای رادار از محدوده واقعی خارج میگردد. ضعف تغذیه الکتریکی و افت ولتاژ باتری نیز یکی از علل نرمافزاری خطا بهشمار میرود، چون رادار برای عملکرد درست به نوسان بسیار دقیق جریان نیاز دارد.
در برخی موارد، نصب غیراستاندارد سپر یا رنگآمیزی ضخیم بخش جلویی، سبب جذب بخشی از امواج الکترومغناطیسی شده و ارتباط بازتابی مختل میشود. خطاهای داخلی نرمافزار ADAS نیز گاهی پس از بهروزرسانی سیستم دوربین یا تنظیم ECU ظاهر میشوند، چراکه جدول کالیبراسیون رادار جلو و موقعیت افقی آن باید با نسخه جدید نرمافزاری هماهنگ گردد. در نهایت، خطاهای زنجیرهای ناشی از دادههای اشتباه حسگر سرعت یا سنسور زاویه فرمان میتواند موجب اعلام خطای رادار جلو شود، زیرا سیستم قادر به همتراز کردن دادههای حرکتی با موقعیت هدف مقابل نیست.
پیشنهاد خواندنی: تعمیر گیربکس MVM X55 Pro
روش تشخیص و کالیبراسیون رادار جلو
تشخیص دقیق خطای رادار جلو تنها با استفاده از دستگاه دیاگ تخصصی ADAS یا تجهیزات کالیبراسیون تصویری انجام میشود. در فرآیند تست، ابتدا ولتاژ تغذیه رادار و کدهای خطا از طریق ECU بررسی میشوند تا نوع نقص مشخص گردد، سپس فاصله واقعی و زاویه تابش سنسور با تابلوهای بازتابی خاص تنظیم میشود. برای انجام کالیبراسیون، خودرو باید روی سطح کاملاً صاف و در فاصله استاندارد از هدف قرار گیرد تا دادههای اصلاحی توسط ماژول پردازش ذخیره شود. هرگونه اختلاف زاویه چند درجهای در جهت عمودی یا افقی، موجب خطا در تشخیص فاصله و هشدارهای اشتباه در هنگام رانندگی میشود.
پس از تنظیم دستی، نرمافزار اختصاصی موقعیت حسگر را با سیستم دوربین جلو و واحد ترمز تطبیق داده تا حالت همزمانی کامل برقرار شود. در خودروهایی که مجهز به سیستم تشخیص خطوط یا کروز تطبیقی هستند، دقت این مرحله اهمیت دوچندان دارد زیرا هر خطای چند سانتیمتری میتواند باعث ترمز ناگهانی خودرو بهاشتباه شود.
در برخی مدلها، کالیبراسیون خودکار پس از روشن شدن خودرو و حرکت مستقیم در مسیر صاف و طولانی انجام میشود، ولی در صورت وجود خطای ثبتشده در ECU لازم است بازتنظیم تخصصی در نمایندگی انجام گیرد. توجه به سلامت پایه نگهدارنده و پیچهای نصب نیز حیاتی است، زیرا هر لرزش یا خمیدگی جزئی میتواند موقعیت زاویه تابش رادار را در طول کار دچار تغییر کند و خطاهای متناوب پدید آورد.
پیشنهاد خواندنی: تعمیر گیربکس فونیکس Tiggo 8 Pro
ارتباط خطای رادار جلو با واحد کنترل ADAS و ECU
رادار جلو تنها بخشی از شبکه ارتباطی ایمنی خودروست که با چندین سیستم دیگر همکاری دارد. دادههای آن از طریق شبکه CAN به واحد ADAS منتقل میشوند و با اطلاعاتی نظیر سرعت چرخها، زاویه فرمان و تصویر دوربین ادغام میگردند تا تصمیم نهایی سیستم ایمنی گرفته شود. در صورت بروز خطای رادار جلو، ارتباط بین ECU اصلی و واحد ADAS مختل شده و الگوریتم تشخیص خطر برخورد یا حفظ فاصله قطع میشود. چنین حالتی معمولاً با پیغام Fault در صفحه کیلومتر یا غیرفعال شدن سیستم کروز هوشمند خود را نشان میدهد.
در بررسی فنی مشخص میشود که اغلب این خطاها ناشی از ناهماهنگی ورژن نرمافزارهاست، بهویژه زمانیکه ECU موتور یا سیستم ترمز آپدیت شده ولی ADAS کالیبراسیون مجدد دریافت نکرده است. در خودروهایی مانند X55، برای هماهنگی دقیق لازم است دادههای سرعت از سنسور ABS مستقیماً به رادار ارسال شود تا محاسبات فاصلۀ اجسام بهدرستی انجام گیرد؛ هرگونه تأخیر یا قطع سیگنال سبب خطای Read Failure میشود.
در برخی موارد دیگر، اختلال ارتباطی در سیمکشی یا oxydation کانکتورهای رادار نیز بهعنوان علت فیزیکی خطا شناخته میشود. برطرف کردن خطای رادار جلو معمولاً با بازنویسی نرمافزار یا تنظیم مجدد پارامترهای فاصله استاندارد انجام میشود، اما در شرایطی که کانکتور یا آنتن آسیب دیده باشند نیاز به تعویض قطعه اجتنابناپذیر است.
راهکارهای نگهداری و پیشگیری از خطای رادار جلو MVM X55 Pro
| اقدام نگهداری | توضیح |
|---|---|
| تمیز نگه داشتن سطح سپر جلو | رادار جلو معمولاً پشت سپر نصب میشود، بنابراین تجمع گل، گردوغبار یا برف روی سطح سپر میتواند انتشار امواج راداری را مختل کرده و باعث ایجاد خطا در سیستم شود. |
| جلوگیری از نصب استیکر یا پوشش تزئینی | نصب برچسبها یا قطعات تزئینی در محدوده سنسور میتواند مسیر انتشار امواج رادار را مسدود کرده و دقت تشخیص فاصله را کاهش دهد. |
| شستوشوی دورهای بخش جلویی خودرو | شستوشوی منظم سپر جلو و خشک کردن کامل محل قرارگیری سنسور پس از بارندگی یا کارواش به حفظ عملکرد دقیق رادار کمک میکند. |
| رعایت اصول هنگام رنگآمیزی سپر | در زمان رنگآمیزی خودرو باید از استفاده از رنگهای ضخیم یا دارای ذرات فلزی در محدوده رادار خودداری شود، زیرا این مواد میتوانند انرژی امواج را جذب کرده و خطای عملکرد ایجاد کنند. |
| بررسی کانکتور و سیمکشی رادار | در سرویسهای دورهای وضعیت کانکتور و سیمکشی رادار باید بررسی شود تا از اکسید شدن، شل شدن یا قطعی اتصال جلوگیری گردد. |
| حفظ ولتاژ پایدار باتری | افت ولتاژ باتری میتواند باعث بروز خطاهای نرمافزاری در سنسورهای جلو شود؛ بنابراین سلامت باتری و سیستم شارژ باید بهطور منظم کنترل گردد. |
| کالیبراسیون پس از تعویض سپر یا تصادف | در صورت تعویض سپر یا وقوع تصادف حتی جزئی، زاویه رادار باید با دستگاه کالیبراسیون تخصصی تنظیم شود تا دقت اندازهگیری فاصله حفظ گردد. |
| جلوگیری از تنظیم دستی رادار | تنظیم دستی زاویه رادار بدون استفاده از تجهیزات تخصصی میتواند باعث خطای دائمی در سیستم کمکراننده شود و توصیه نمیشود. |
| محافظت در برابر ضربه و دمای بالا | مدار تقویتکننده رادار نسبت به حرارت بالا و ضربه حساس است؛ بنابراین باید از قرارگیری طولانیمدت خودرو در شرایط دمایی بالاتر از ۸۵ درجه سانتیگراد و ضربات مستقیم جلوگیری شود. |
| اهمیت نگهداری صحیح | رعایت این نکات موجب عملکرد دقیق سیستمهای کمکراننده، جلوگیری از هشدارهای کاذب و حفظ کارایی سیستم ترمز اضطراری خودکار میشود. |
سوالات متداول
آیا خطای رادار جلو پس از شستوشوی خودرو طبیعی است؟
بله، معمولاً پس از شستوشو یا حرکت در باران سنگین، قطرات آب یا بخار روی سطح سنسور مینشیند و تا خشک شدن کامل باعث نمایش هشدار موقت خطا میشود. این وضعیت طبیعی است و پس از چند دقیقه رانندگی در هوای آزاد خودبهخود برطرف میگردد.
آیا میتوان رادار جلو را بدون دستگاه تخصصی کالیبره کرد؟
خیر، زیرا زاویه رادار باید دقیقاً با محور طولی خودرو منطبق شود و هر انحراف جزئی موجب خطای فاصله یا هشدارهای اشتباه در سیستم کروز میشود. تنها با استفاده از ابزارهای کالیبراسیون لیزری ADAS و نرمافزار تشخیصی کارخانه میتوان تنظیم صحیح را انجام داد.