

تنظیم سنسور رادار و کالیبراسیون MVM X55 Pro
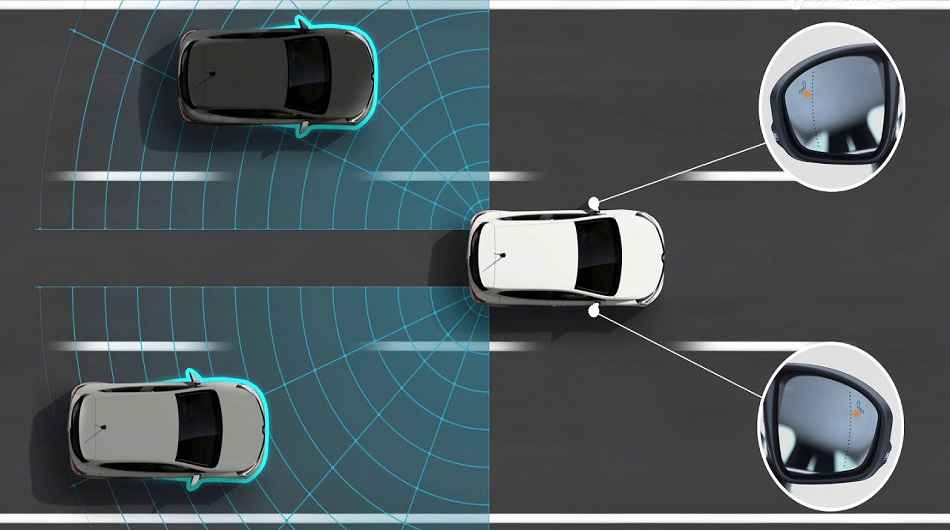
سنسور رادار یکی از اجزای کلیدی در سیستمهای کمکراننده (ADAS) محسوب میشود که وظیفه اصلی آن شناسایی اجسام، وسایل نقلیه و موانع در مسیر حرکت خودرو است. این سنسور با ارسال امواج الکترومغناطیسی در فرکانسهای بالا و دریافت بازتاب آنها از اجسام مقابل، فاصله، سرعت نسبی و زاویه حرکت را محاسبه میکند. در خودروهای مدرن، رادار معمولاً در سپر جلو یا عقب نصب شده و با واحد کنترل مرکزی (ECU) از طریق شبکه CAN ارتباط مستقیم دارد تا دادهها را بهصورت بلادرنگ در اختیار سیستم ترمز خودکار، هشدار برخورد و کروز تطبیقی قرار دهد.
دقت عملکرد این سامانه وابسته به زاویه نصب و موقعیت دقیق فیزیکی رادار است، زیرا هر انحراف جزئی در راستای عمودی یا افقی میتواند منجر به خطای تشخیص فاصله یا فعال شدن نابجای سیستم ترمز شود. سنسورهای راداری علاوه بر تحلیل سرعت و فاصله، توانایی تمایز میان خودروهای ثابت و متحرک را دارند؛ بدین معنا که با بررسی تغییر فرکانس بازتابی (اثر داپلر)، انواع اشیاء را بر اساس رفتار حرکتیشان تفکیک میکنند. این قابلیت خصوصاً در زمان رانندگی شهری یا حرکت در ترافیک پرچگال اهمیت ویژهای دارد. از آنجا که رادار تحت تأثیر عوامل خارجی مانند دما، ضربه یا آلودگی سطح قرار میگیرد، تنظیم سنسور رادار و کالیبراسیون دورهای آن برای حفظ دقت عملکرد الزامی است.
اهمیت تنظیم سنسور رادار و کالیبراسیون MVM X55 Pro
کالیبراسیون سنسور رادار فرآیند بازتنظیم پارامترهای عملکردی برای تطبیق دقیق با موقعیت نصب و شرایط محیطی است. پس از هر تعمیر یا تعویض سپر جلو، ضربه جزئی، یا حتی جابجایی کوچک در پایههای نگهدارنده، زاویه ارسال موج رادار ممکن است تغییر کند. این تغییر اگرچه در ظاهر ناچیز است، اما در عمل موجب خطاهای جدی در اندازهگیری فاصله، فعال شدن نابجای سیستم ترمز اضطراری یا کاهش حساسیت در تشخیص اجسام کوچک خواهد شد. کالیبراسیون صحیح باعث میشود میدان دید رادار با محور مرکزی خودرو کاملاً منطبق شود تا امواج بازتابی درست پردازش گردند.
در خودروهای دارای سیستم کروز تطبیقی، تنظیم سنسور رادار و کالیبراسیون تعیینکننده فواصل ایمن بین خودروهاست، زیرا خطای چند درجهای میتواند واکنش ترمز را تا نیمثانیه به تأخیر اندازد. علاوه بر موقعیت فیزیکی، شرایط دمایی و انبساط مواد سپر نیز در دقت عملکرد تأثیر میگذارند و به همین دلیل در برخی مدلها، نرمافزار تطبیق خودکار زاویه رادار پس از ۵ تا ۱۰ دقیقه رانندگی اولیه فعال میگردد تا خطاهای محیطی جبران شوند. همچنین پس از بروزرسانی ECU یا نصب سامانههای جانبی مثل دوربین جلو، هماهنگی بین دادههای زاویه دید دوربین و رادار باید مجدد بررسی شود، زیرا هر عدم تطابق باعث خطای هشدار انحراف مسیر یا تصادم خواهد شد.
پیشنهاد خواندنی: تعمیر گیربکس MVM X55 Pro
روند فنی تنظیم سنسور رادار و کالیبراسیون MVM X55 Pro
فرآیند فنی کالیبراسیون رادار MVM X55 Pro بهصورت مرحلهبهمرحله انجام میشود و نیازمند تجهیزات دقیق است تا زاویه فرستنده و گیرنده رادار با محور مختصات خودرو همراستا گردد. در ابتدا خودرو باید روی سطح تراز و کاملاً افقی قرار گیرد تا هیچگونه اختلاف ارتفاع بر زاویه تابش امواج اثر نگذارد. سپس فاصله مرجع معین (معمولاً بین ۱.۵ تا ۲.۵ متر از سپر) توسط صفحه کالیبراسیون نصبشده در مقابل رادار تعیین میشود. دستگاه دیاگ مخصوص کارخانه ارتباط مستقیم با واحد کنترل رادار برقرار کرده و تنظیمات اولیه شامل زاویه عمودی، افقی و تعادل فاز را نمایش میدهد.
در این مرحله، تکنسین با اعمال تغییرات میلیمتری در پایه رادار، موقعیت دقیق را تا زمان همراستایی کامل با محور مرکزی خودرو تنظیم میکند. پس از همترازی فیزیکی، نرمافزار خودرو علاوه بر تطبیق موقعیت، پارامترهای پاسخ امواج را تست میکند تا از صحت تشخیص فاصله اطمینان حاصل شود. در مدلهای مجهز به چند حسگر راداری، کالیبراسیون همزمان برای هماهنگی بین سمت چپ و راست انجام میشود تا دادههای دریافتی همپوشانی دقیق داشته باشند.
در پایان، خودرو باید در مسیر مستقیم با سرعت ۴۰ تا ۶۰ کیلومتر حرکت کند تا سیستم در شرایط واقعی عملکرد خود را اصلاح نماید. خطاهای احتمالی مانند “Radar Misalignment” یا “Front Collision Sensor Fault” پس از رانندگی آزمایشی اگر باقی بمانند، نشاندهندهٔ نیاز به تکرار کالیبراسیون هستند. این فرایند باید فقط با دستگاههای تاییدشده و در دمای بین ۱۵ تا ۳۰ درجه انجام شود تا اثرات انبساط سپر یا تغییر ماده پوششی در دقت اندازهگیری تأثیر منفی نگذارد.
پیشنهاد خواندنی: تعمیر گیربکس فونیکس Tiggo 8 Pro
ارتباط تنظیم رادار با واحدهای کنترلی و ایمنی خودرو
سنسور رادار تنها یک حسگر مستقل نیست بلکه بخشی از شبکه هوشمند ایمنی محسوب میشود که دادههای خود را همراه با اطلاعات دریافتی از ECU، ABS، ESP و ADAS ترکیب میکند. زمانبندی درست ارسال و دریافت امواج، تطبیق با سرعت خودرو و زاویه فرمان، همگی تحت کنترل نرمافزار مرکزی انجام میشود. تنظیم یا کالیبراسیون اشتباه میتواند تعامل میان واحدهای کنترلی را بههم بزند و عملکرد سیستمهای کمکی مثل ترمز خودکار یا هشدار خروج از مسیر را مختل کند.
بهطور مثال، اگر زاویه رادار چند درجه به راست منحرف شود، سیستم ممکن است خودرو مقابل را زودتر از حد واقعی تشخیص دهد و بهطور ناگهانی ترمز بگیرد. همچنین واحد کنترل پایداری (ESP) دادههای مربوط به زاویه فرمان و سرعت چرخها را با اطلاعات رادار مقایسه میکند تا مسیر واقعی حرکت را شناسایی کند، بنابراین هر گونه اختلاف در دادهها به صدور هشدارهای کاذب منجر میشود. پس از هر کالیبراسیون، پارامترهای جدید باید به TCU و ECU اعلام شوند تا هماهنگی میان سیستمهای حرکتی و ایمنی حفظ گردد.
اهمیتی که ارتباط میان ماژولها دارد، دلیل اصلی الزام شرکتهای سازنده برای انجام کالیبراسیون فقط با تجهیزات مجاز و نرمافزار اختصاصی هر برند است. هماهنگی این سیستمها در نهایت به اصلاح رفتار رانندگی کمک میکند، به این معنا که خودرو در ترافیک، ترمز و شتاب را متناسب با فاصله واقعی و سرعت خودروهای اطراف تنظیم مینماید. از آنجا که اکثر خطاهای تصادفات ناشی از هشدار نادرست رادار است، نگهداری و تطبیق نرمافزاری منظم از دید ایمنی راهبردی محسوب میشود.
نگهداری پیشگیرانه و توصیههای پس از کالیبراسیون
| اقدام نگهداری پیشگیرانه | توضیح فنی |
|---|---|
| تمیز نگهداشتن سطح سپر در محل رادار | تجمع گردوغبار، موم یا آلودگی جاده روی سطح سپر میتواند مسیر انتشار امواج رادار را منحرف کرده و در سرعتهای بالا باعث خطا در اندازهگیری فاصله شود. |
| اجتناب از فشار مستقیم آب در زمان شستوشو | در کارواش یا شستوشوی دستی نباید فشار مستقیم آب روی محل نصب رادار اعمال شود، زیرا ممکن است موجب جابجایی جزئی سنسور یا نفوذ رطوبت به کانکتورها گردد. |
| جلوگیری از حرارت بالا روی سپر | قرار گرفتن طولانیمدت در معرض حرارت زیاد یا استفاده از بخار داغ میتواند باعث تغییر شکل یا انحنای سپر شده و زاویه تابش امواج رادار را دچار خطا کند. |
| بررسی موقعیت رادار پس از تصادف یا برخورد | حتی برخوردهای سبک در زمان پارک ممکن است باعث جابجایی پایه رادار شود؛ در این شرایط باید موقعیت آن بررسی و در صورت لزوم کالیبراسیون مجدد انجام شود. |
| تکرار تنظیم پس از بروزرسانی نرمافزار ECU یا ADAS | پس از آپدیت نرمافزار سیستمهای کنترلی خودرو، تنظیم نرمافزاری رادار باید مجدداً انجام شود تا دادههای زاویه و محدوده دید با الگوریتمهای جدید هماهنگ گردد. |
| هماهنگی سنسورها در سیستمهای چندحسگری | در خودروهایی که از ترکیب رادار و دوربین استفاده میکنند، تغییر ارتفاع یا زاویه بدنه میتواند باعث عدم همپوشانی دادهها شود و نیاز به تطبیق مجدد سنسورها ایجاد کند. |
| کنترل دورهای ولتاژ تغذیه سنسور | بررسی سالانه ولتاژ ورودی و کیفیت تغذیه الکتریکی رادار باعث جلوگیری از افت عملکرد و حفظ پایداری سیگنال میشود. |
| بررسی مقاومت داخلی و سلامت مدار سنسور | اندازهگیری مقاومت داخلی و بررسی سلامت مدارهای الکترونیکی سنسور میتواند از بروز خطاهای تدریجی در عملکرد سیستم جلوگیری کند. |
| کاهش احتمال هشدارهای خطای مکرر | نگهداری صحیح و سرویس منظم رادار از ثبت خطاهای مکرر در ECU جلوگیری کرده و پایداری عملکرد سیستمهای کمکراننده را حفظ میکند. |
| حفظ عملکرد صحیح سیستمهای ایمنی | نگهداری دقیق سنسور رادار نقش مهمی در عملکرد صحیح سیستمهایی مانند ترمز اضطراری خودکار و کروز کنترل تطبیقی دارد و ایمنی خودرو را افزایش میدهد. |
سوالات متداول
آیا پس از تعویض سپر نیاز به کالیبراسیون رادار وجود دارد؟
بله، زیرا هر تغییر در موقعیت فیزیکی یا زاویه نصب رادار باعث انحراف میدان دید و کاهش دقت تشخیص میشود. پس از هر تعویض یا تعمیر سپر، انجام کالیبراسیون مجدد ضروری است تا زاویه و فاصلهدهی به شرایط کارخانه برگردد.
آیا کالیبراسیون رادار فقط به وسیله دیاگ انجام میشود؟
خیر، علاوه بر دستگاه دیاگ برای تطبیق نرمافزاری، کالیبراسیون فیزیکی با ابزار تنظیم زاویه و صفحه مرجع انجام میشود تا محور تابش امواج دقیقاً با محور خودرو هماهنگ گردد؛ هر دو مرحله برای دقت کامل لازم هستند.